[CE 1.1]
I worked with the team on this project with the title “Human Detection Robot” for the degree fulfilment in the Electrical Engineering field at University of Faisalabad. It was completed between the tenure of [Date] till [Date].
| Project Title | Human Detection Robot |
| Date | [Date] – [Date] |
| Location | University of Faisalabad, Pakistan |
| Position | Electrical Engineering Student |
[CE 1.2] In the field of robotics, the increasing advancement in the technology assist in obtaining and facilitating the mankind. The whole new robotics under the electrical engineering race can be earned with this and manual robot controlling can be replaced with this autonomous process. Other parameters which include sensor with optimum performance and parameters were obtained. Modern power engineering in today’s world activates the human race facilitation in each possible direction. Metal detectors along with other previously utilized sensors having low proficiency were utilized. However, it could result in obtaining unsatisfactory results. The system was much improved and advanced with the utilization of PIR sensor in the upcoming design.
[CE 1.3]
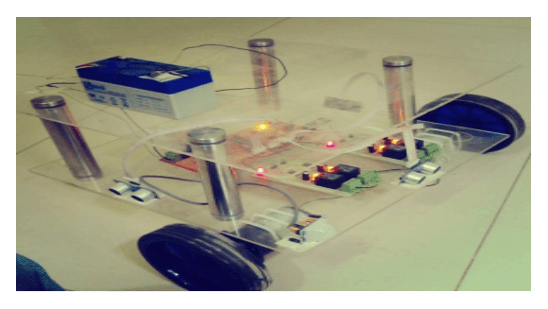
The project objective was the development of human detection robot and it was done with the assistance of the sensor which I learnt in Electrical Engineering termed as PIR sensor. It emitted the IR rays for the human detection. I researched and noted that the live human emit thermal radiations and these can be detected with the assistance of PIR sensor. There were two ends which included transmitter and receiver for performing the operation. I designed the robot and placed this PIR sensor in front of the robot which moved with in all the directions. In either direction, the robot moved with the geared dc motor rotation and it resulted in obtaining the optimum torque and minimizing the speed. I derived the motor with the relays which was required for movement and turning in forward and reverse directions with more accuracy.
[CE 1.4]
The project nature was revolved on the implementation of the PIR attached robot which can be utilized for the detection of thermal radiations emitted from the human body and it was executed utilizing my Electrical Engineering knowledge.
[CE 1.5]
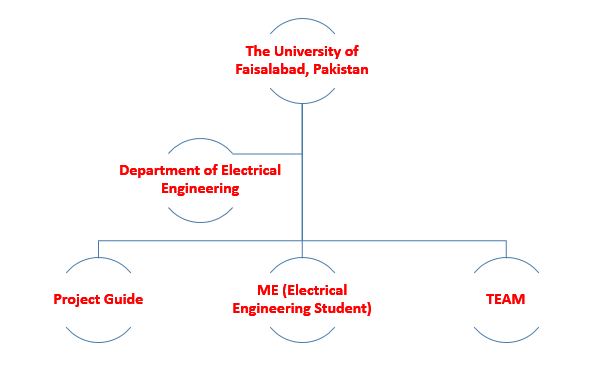
Below organogram illustrated my position in the project -
[CE 1.6]
[CE 1.7]
In simple robot, there was the transmitter side circuitry which worked with the field and performed the actions in time for executing the operation. The direct communication assisted me in reaching to the target with the receiver end. On robot, I embedded three ultrasonic sensors which was needed for sending signals one by one and executing point crossing the hurdles and moving along the open way. It was completed by keeping the search option “ON” at any particular object achievement and it was possible with the PIR sensor to execute the deliver signal and receive it following with the remaining process. I implemented the hardware structure which resulted in dealing with the overall robot outlook design and it was important for holding the equipment. I also added other sections which included robot movement under the tough circumstances along with the action performance related to the robot model safe side development.
[CE 1.8]
While working on the robot design, I made sure to add these features in the robot: Avoid obstacle and steer it way through the desired field of operation.
[CE 1.9]
I added the buzzer with the navigation when the receiver side of the signal buzzed and it resulted in object achievement and it was then processed with the start at either end. It was controller and monitored the whole process which made the decision as per the set criteria. I set the signal operation at “robot stuck” mode and it was impossible for an audio alert for manual operation to send it to the receiver.
[CE 1.10]
I faced few problems while working on the project and I dealt with them appropriately for obtaining the decent project outcome.
[CE 1.11]
I worked on the human detection robot based on the efficiency which was required to be at least 90% as per the scenario. I estimated the hurdles which occurred in the distance and movement as per the passage and programming was carried out in such a way to avoid the robot’s block positions. It was then moved towards the open way. I implemented the programming in such a way that it can even be used in earthquake disasters to figure out the stuck human.
[CE 1.12]
I determined the robot efficiency with the speed and movement along with the right path and it was done for avoiding the block paths. I then made the robot programming to move it in an open direction. I selected the speed motors for carrying the robot’s weight along with the pass-through towards the minor resistances in the moving path. I made two angles of 90 degrees in the left and right side which moved in front and back directions accordingly. I stopped one motor at left while the other one was stopped at right for making the perfect 90 degrees as per the scenario.
[CE 1.13]
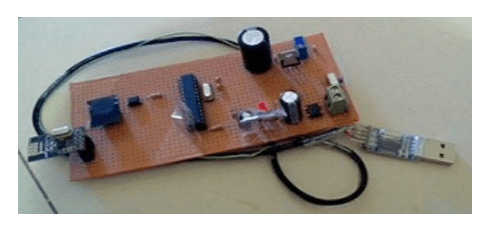
I implemented the circuit which was based on the motor control circuit and the circuit sensors. I completed the programming with the processing unit. I programmed all the priority commands and obtained the execution sequences. I fully programmed the timing between the sensor 1, processing unit and sensor 2. For the processing unit, I performed the coding related to all the commands and sequences which were compared well while running the whole program. I implemented it with the loops creation and noted the system errors in the commands. At both transmitter and receiver ends, I set all the commands positive with no signal loss utilizing the transmission among the field mover and database.
[CE 1.14]
There were few security concerns which I obtained while working on the robot design and it included the robot demonstration to portray the directional movement abilities in it. I added the sensor prediction along with the operator interfacing for the dummy victims. Thus, it assisted me in not using victim in the testing demonstration and overall prevented the violation concern. Within the excessive legal operation band, I used all the communication channels. I did not use the communications bands like GSM. I equipped the robot with more than one constituent which could be utilized as weaponry.
[CE 1.15]
I developed the robot which was field efficient and utilized the theme and structure for the robot proto-type. It was done with the optimization and designing of the working principle. I noted that more updated results can be obtained with the slight change in the outlook structure in the equipment and circuitry which were used in the robot proto-type. Overall, I strengthened my Electrical Engineering skills at the project completion.
To read more.............. Kindly check the below links.
We hold the apex position in providing services regarding CDR writing for engineers Australia. We are known to have very high success records for consistent team of professional writers having years of experience in the field of CDR preparation. We provide the best and trusted service for CDR writing and reviewing of all kinds of engineering disciplines. We provide services for career episode writing, plagiarism check and removal etc.
Should you need any further information, please do not hesitate to contact us.
Contact: +61-4-8885-8110
WhatsApp: +61-4-8885-8110
(Australia, USA, UK, UAE, Singapore, New Zealand)
